3. rész – Esettanulmány (06.07.): amikor a jelenség eseménnyé válik
(sorozat: Drón, adat és hibák mezőgazdasági környezetben)
A második részben (https://www.cloudia.info/2-resz-hogyan-epul-fel-a-dron-fedelzeti-helyzetkepe/) bemutatott fedélzeti állapotbecslési folyamat gyakorlati következményei egy konkrét monitoring repülés során váltak értelmezhetővé. A vizsgált eset egy mezőgazdasági területen végrehajtott adatgyűjtő művelet volt, amely manuális üzemmódú felszállással indult, majd a drón szintén manuális irányítás mellett haladt a tervezett munkaterület felé. A repülési napló alapján már a művelet megkezdésének korai szakaszában több, a fedélzeti rendszer által rögzített eltérés volt azonosítható. Ezen eltérésekről a rendszer a távpilóta számára piros színnel jelzett figyelmeztető üzeneteket jelenített meg a repülés során.
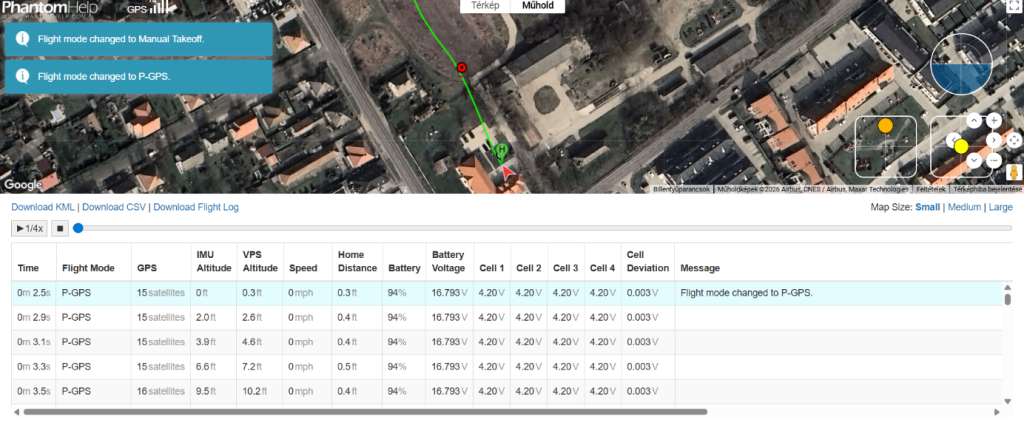
1. ábra Manuális irányítás a tervezett munkaterület irányába a monitoring művelet megkezdése előtt
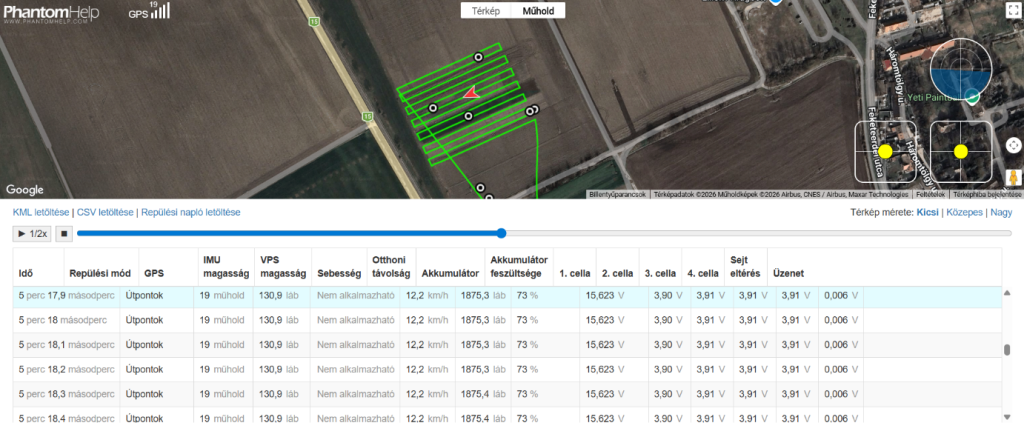
A PhantomHelp egy külső, logelemzésre szolgáló felület, amely a drón által rögzített repülési adatok vizuális megjelenítését és időbeli kiértékelését teszi lehetővé. A cikkben hivatkozott ábrák a fedélzeti flight logok utólagos feldolgozásából származnak. A PhantomHelp felületen megjelenített adatok szerint a felszállást követően, még a tényleges monitoring művelet megkezdése előtt, ismétlődően jelentkeztek GPS-pozícióeltérésre utaló jelzések. Ezek nem egyetlen időpillanatban jelentek meg, hanem rövid időközökkel, egymást követő mintákban voltak jelen, amit a térképes megjelenítésen látható piros jelölések is alátámasztanak. A repülési mód mindvégig P-GPS módban maradt. Az említett repülési mód az alkalmazott drón pozícionált üzemmódja, amely GNSS-adatokra támaszkodva automatikus stabilizálást és pozíciótartást biztosít. A művelet ezen szakaszában a repülési mód nem került megváltoztatásra. A rendszer több alkalommal rögzítette, hogy a GNSS-alapú pozíciómeghatározás pontossága nem ideális melyről a távpilóta tízen egyszer kapott piros GPS Position Mismatch jelzést.
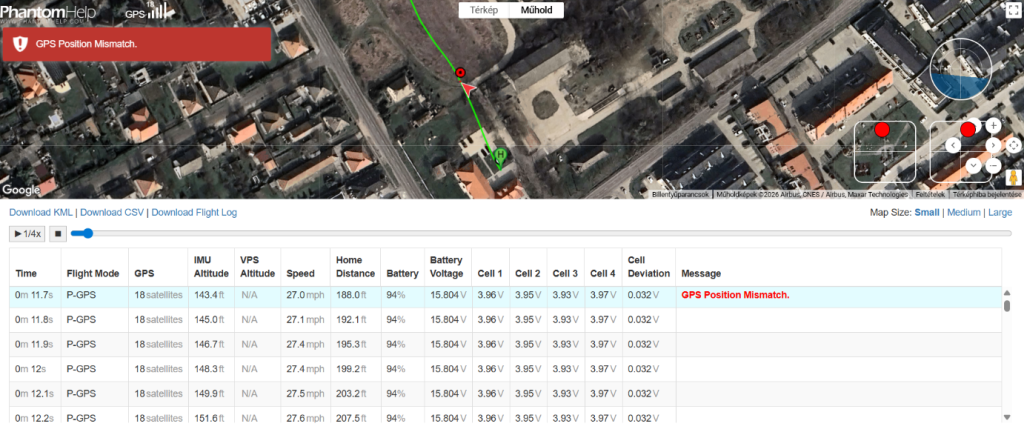
2. ábra GPS-pozícióeltérés felszállást követő szakaszban
A GPS-pozícióeltérésekkel párhuzamosan az akkumulátoradatokban is megfigyelhetők voltak eltérések. A repülés korai szakaszában a logok alapján az akkumulátor egyes celláinak feszültségértékei között több, egymást követő időpillanatban érzékelhető különbség jelent meg, amely a későbbi kiértékelés során a drón által megtett útvonal mentén pirossal jelölt szakaszokon volt azonosítható. Mindez magas töltöttségi szint mellett történt, ami arra utal, hogy nem klasszikus lemerülési állapotról, hanem dinamikus terheléshez vagy átmeneti üzemi állapothoz köthető jelenségről van szó. Ezek az adatok önmagukban nem minősülnek hibának, ugyanakkor a fedélzeti állapotértékelés szempontjából releváns információt hordoznak. Az ehhez hasonló esetekben a művelet során észlelt bizonytalan akkumulátoradatok indokolttá tehetik a repülés megszakítását és az akkumulátor állapotának ellenőrzését.
A cél az ilyen jellegű műveleti kockázatok csökkentése, illetve alacsony szinten tartása.
Ennek részeként a műveletbe bevont akkumulátorok állapotát minden esetben ellenőrizni kell a repülés megkezdése előtt.
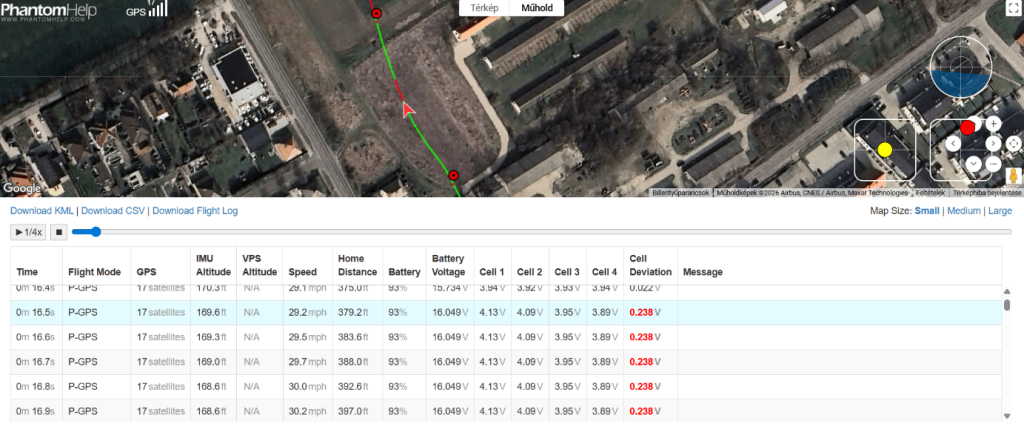
3. ábra Akkumulátorcellák feszültségadatai a repülés korai szakaszában
A repülési adatok alapján a manuális irányítás alatt végrehajtott mozgás során fokozatos oldalirányú eltérések váltak azonosíthatóvá a tényleges repülési pályán. Ezek kezdetben nem voltak egyértelműek, és nem kényszerítették a távpilótát azonnali beavatkozásra. A GPS-pozícióeltérésre vonatkozó jelzések ugyanakkor ebben az időszakban folyamatosan jelen voltak, miközben a légijármű manuális irányítás alatt állt.
A rendelkezésre álló adatok több, egymással párhuzamosan megjelenő jelzés egyidejű fennállását mutatják, amelyek időben egymást követve, illetve részben átfedésben jelentkeztek. Ezek pontos értelmezése kizárólag a repülési logok részletes, időbeli bontásán keresztül lehetséges. Ugyanakkor az adatrögzítés csak a repülés egy meghatározott szakaszáig biztosít objektív információt, ezért az alábbiakban az események tényszerű lezárására és a rendelkezésre álló adatok határainak bemutatására helyezzük a hangsúlyt.
A monitoring művelet megkezdése és végrehajtása:
A repülés során a pilóta a felszállást és az előkészítő manővereket követően az automatizált monitoring művelet indítására váltott. Az előre megtervezett útvonal aktiválását követően a légijármű megkezdte az automatizált repülést, és a monitoring feladat végrehajtása. A rendelkezésre álló adatok alapján a művelet ezen szakasza az elvárt módon zajlott.
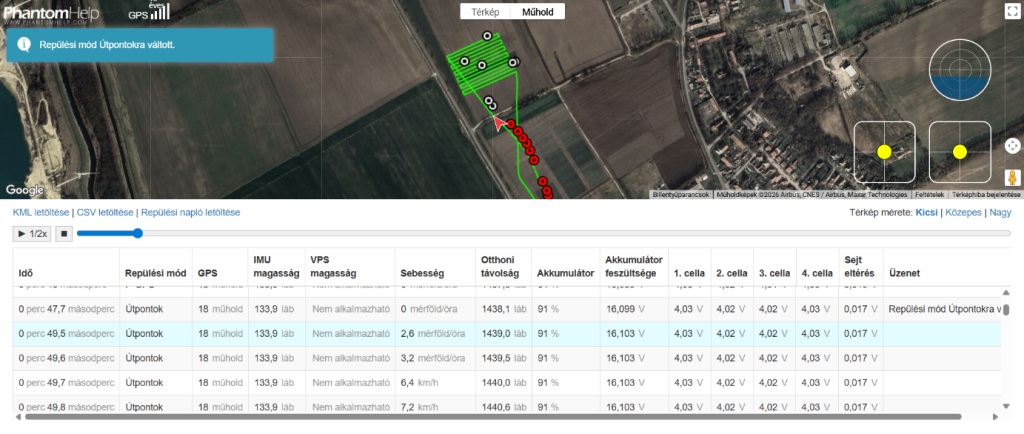
4. ábra Repülési mód váltás, automatizált monitoring művelet megkezdése
A fedélzeti visszajelzések ebben a szakaszban nem jeleztek olyan rendellenességet, amely a művelet megszakítását indokolta volna, az útvonal teljesítése megtörtént, és a monitoring feladat befejeződött.
5. ábra A monitoring művelet közben
A monitoring lezárása és üzemmódváltás:
A monitoring művelet lezárását követően a pilóta Return-to-Home (RTH) módba váltotta a légijárművet. Ennek megfelelően az eszköz megkezdte az előre beállított RTH magasság felvételét vertikális irányban.
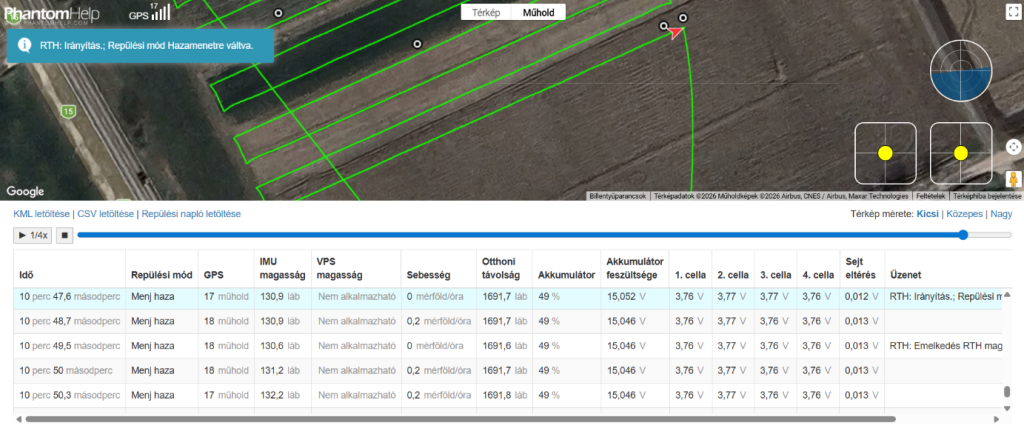
6. ábra RTH irányítás; váltása
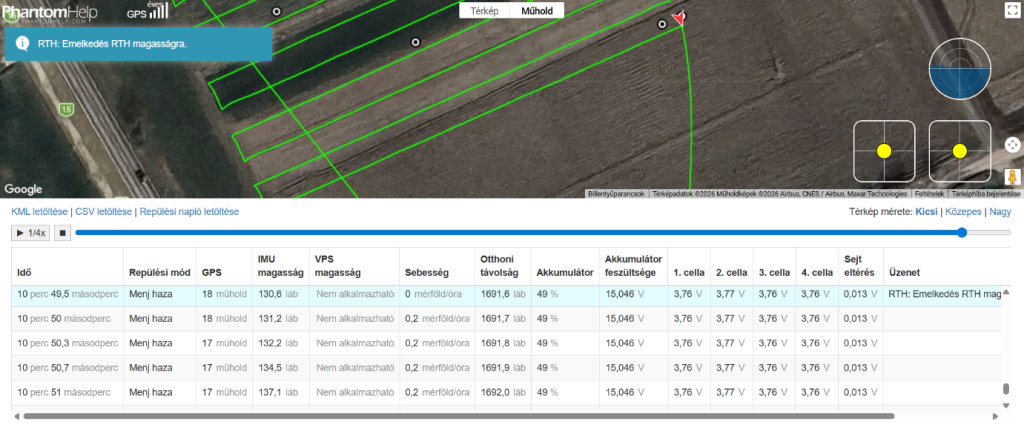
7. ábra Alkalmazott eszköz megkezdi az előzetesen megadott RTH magasság felvételét
Ezt követően a pilóta megszakította az automatizált visszatérési folyamatot, manuális üzemmódba kapcsolt, és a hazatérést kézi irányítással folytatta

8. ábra Repülési mód váltás P-GPS-re a távpilóta által
Manuális hazatérés és kapcsolatvesztés:
A manuális irányítás alatti hazatérés kezdeti szakaszában a fedélzeti visszajelzések alapján nem jelentkeztek hibaüzenetek vagy rendszerfigyelmeztetések. A hazatérés gondtalanul zajlott.

9. ábra Alkalmazott eszköz irányítása manuálisan
A manuális irányítás alatti hazatérés későbbi szakaszában a légijármű mozgásában rövid ideig rendellenes, driftre emlékeztető eltérés volt megfigyelhető. A távpilóta ezt az eltérést érzékelte, és aktív beavatkozással korrigálta, a repülés ezt követően folytatható maradt.

10. ábra Drift megjelenése a teljes jelvesztés előtt
Ebben a szakaszban az irányítás viselkedésében már észlelhető volt bizonyos fokú bizonytalanság, ugyanakkor a fedélzeti rendszer nem adott ki hibaüzenetet vagy figyelmeztetést.

11. ábra Az eszköz hibajelzés nélkül, halad a távpilóta által irányítva
A repülés későbbi szakaszában azonban a távvezérlő és a légijármű közötti kapcsolat váratlanul megszakadt. A kapcsolatvesztéssel egyidejűleg a repülési log rögzítése is megszűnt, így a repülés utolsó fázisáról már nem áll rendelkezésre teljes körű objektív adat. A rendelkezésre álló információk alapján nem zárható ki, hogy a kapcsolat megszakadását közvetlenül megelőzően a légijármű mozgásában rövid ideig oldalirányú eltérés is megjelent, azonban ennek mértéke és pontos szerepe már nem rekonstruálható egyértelműen. Az eszköz és a távpilóta között minden kapcsolat megszakadt, ami azt eredményezte, hogy a távirányító semmilyen visszajelzést nem adott, még kamera képet sem.

12. ábra A teljes jelvesztés állapota
Kimenet és tanulság:

A kapcsolat megszakadását követően a légijármű földet ért, és fizikailag több kritikus sérülést szenvedett. A sérülések mértéke miatt az eszköz további repülési művelet végrehajtására alkalmatlanná vált, amit a mellékelt képen látható állapot is alátámaszt. Az eseményt követően a légijármű olyan állapotba került, hogy a gyártó a további vizsgálatok helyett az eszköz cseréjére tett javaslatot.
Az esemény utólagos értékelése során fontos tanulságként jelenik meg, hogy a repülés korai és középső szakaszában már több, egymást követő fedélzeti jelzés és rendellenes viselkedés volt azonosítható. Ezek a jelzések önmagukban nem indokolták a monitoring művelet azonnali megszakítását, ugyanakkor összességükben olyan állapotot jeleztek, amely fokozott figyelmet igényelt. Utólag visszatekintve célszerűbb döntés lehetett volna a monitoring művelet korábbi megszakítása és a biztonságos hazatérés megkezdése, még abban az esetben is, ha a repülés egyes szakaszai látszólag stabilan zajlottak.
