(Series: Drones, Data, and Failures in an Agricultural Environment)
The practical consequences of the onboard state estimation process presented in Part 2 became interpretable during a specific monitoring flight (https://www.cloudia.info/2-resz-hogyan-epul-fel-a-dron-fedelzeti-helyzetkepe/). The examined case involved a data collection operation conducted over an agricultural area. The mission began with a manual takeoff, after which the drone proceeded toward the planned work area under continued manual control.
Based on the flight logs, several anomalies recorded by the onboard system were already identifiable at an early stage of the operation. During the flight, the system displayed red warning messages to the remote pilot indicating these deviations.

Figure 1 Manual flight toward the planned work area prior to the start of the monitoring operation
PhantomHelp is an external log analysis platform that enables the visualization and temporal evaluation of flight data recorded by the drone. The figures referenced in this article are derived from post-processing of onboard flight logs. According to the data displayed in the PhantomHelp interface, repeated indications of GPS position mismatch occurred after takeoff, even before the actual monitoring operation began. These warnings did not appear at a single moment but occurred in recurring patterns at short intervals, as confirmed by the red markers visible on the map display.
Throughout this period, the flight mode remained P-GPS. This mode represents the drone’s position-hold operation, relying on GNSS data to provide automatic stabilization and position holding. During this phase of the mission, no change in flight mode was initiated. The system repeatedly recorded that the accuracy of GNSS-based positioning was not optimal, which resulted in the remote pilot receiving frequent red GPS Position Mismatch warnings.
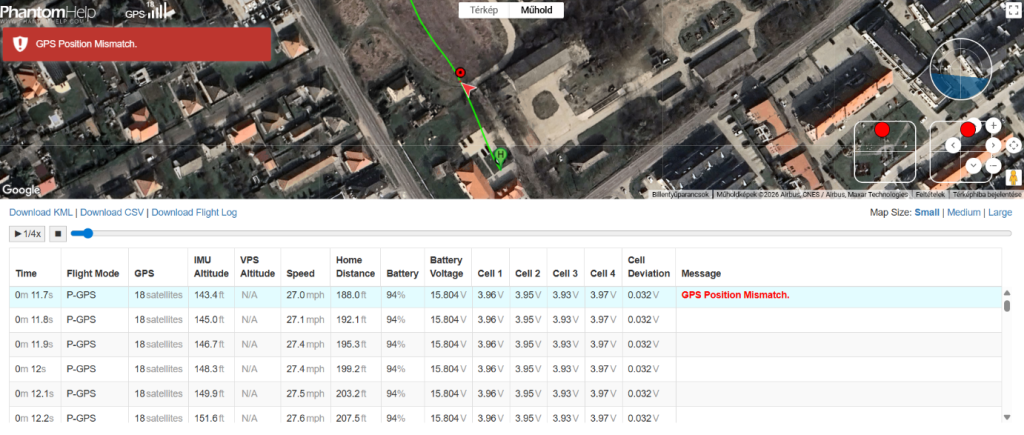
Figure 2 GPS position mismatch in the post-takeoff phase
In parallel with the GPS position deviations, irregularities were also observed in the battery data. During the early phase of the flight, the logs showed noticeable voltage differences between individual battery cells across several consecutive time intervals. These deviations were identifiable during post-analysis along sections of the flight path highlighted in red.
Importantly, this occurred at a high overall state of charge, suggesting that the phenomenon was not related to classical battery depletion but rather to dynamic load conditions or transient operating states. While such data do not constitute a fault on their own, they represent relevant information from the perspective of onboard state assessment. In similar cases, uncertain battery data observed during operation may justify aborting the flight and checking the battery condition.
The objective is to reduce or maintain such operational risks at a low level. As part of this approach, the condition of batteries involved in any operation must always be checked prior to flight.
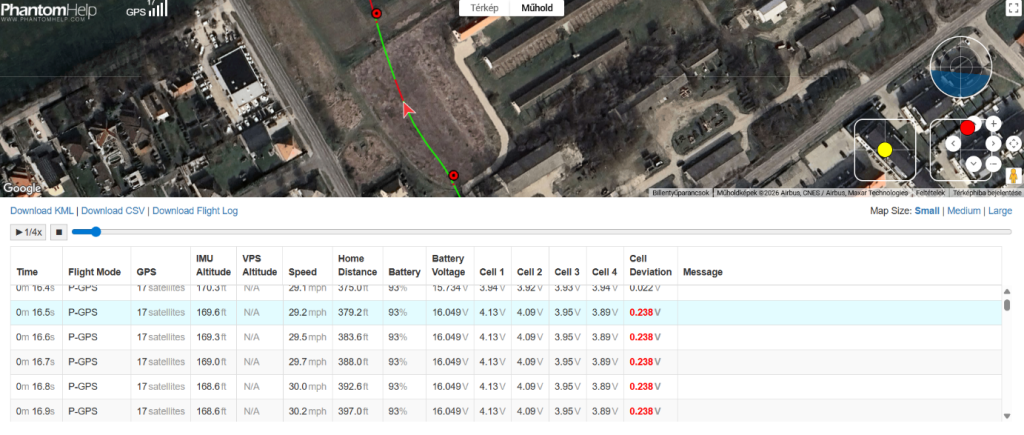
Figure 3 Battery cell voltage data during the early phase of the flight
Based on the flight data, gradual lateral deviations became identifiable in the actual flight path during manual control. Initially, these deviations were not clearly apparent and did not require immediate intervention by the remote pilot. However, GPS position mismatch warnings remained continuously present during this period while the aircraft was under manual control.
The available data indicate the simultaneous presence of multiple parallel signals that appeared sequentially in time and partially overlapped. Accurate interpretation of these phenomena is only possible through detailed temporal analysis of the flight logs. However, data recording provides objective information only up to a certain phase of the flight. Therefore, the following sections focus on the factual closure of the events and on outlining the limits of the available data.
Start and Execution of the Monitoring Operation
Following takeoff and preparatory maneuvers, the pilot initiated the automated monitoring operation. After activating the pre-planned route, the aircraft began automated flight and execution of the monitoring task. Based on the available data, this phase of the operation proceeded as expected.

Figure 4 Flight mode transition and start of the automated monitoring operation
During this phase, onboard feedback did not indicate any anomalies that would have justified aborting the mission. The route was completed successfully, and the monitoring task concluded.
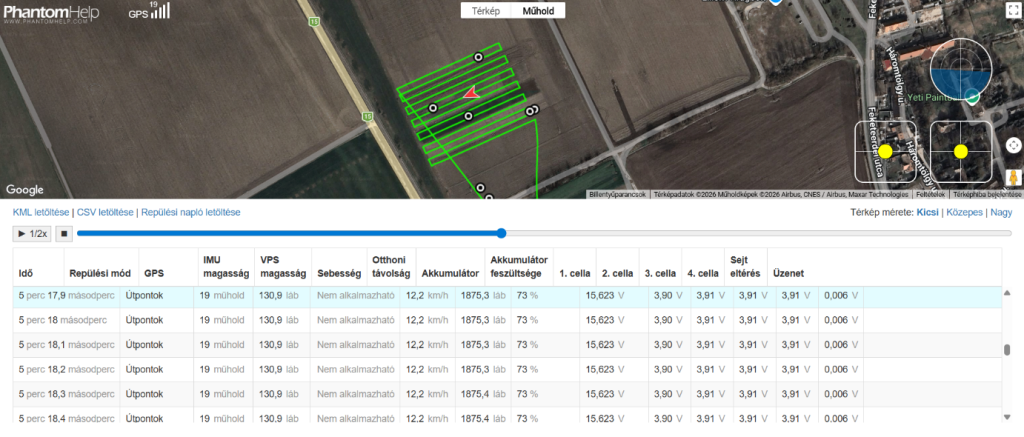
Figure 5 Monitoring operation in progress
Completion of Monitoring and Mode Transition
After completing the monitoring task, the pilot switched the aircraft to Return-to-Home (RTH) mode. Accordingly, the system initiated a vertical climb to the predefined RTH altitude.
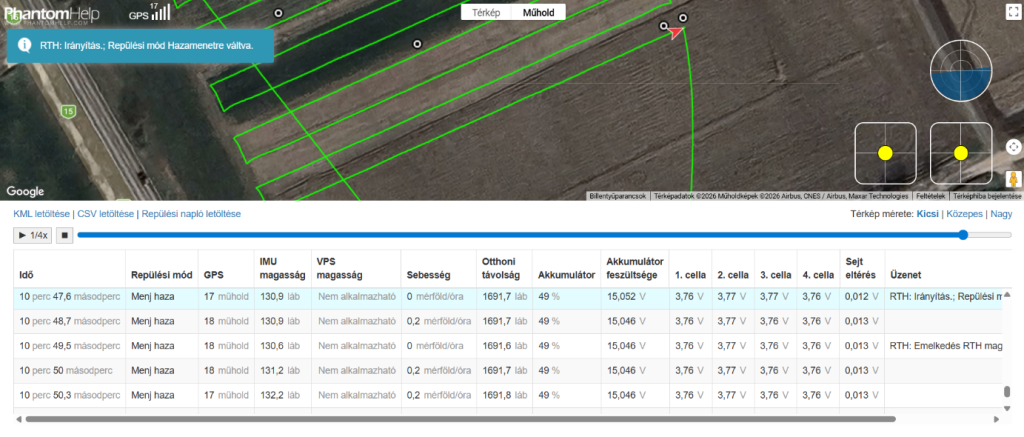
Figure 6 RTH control activation
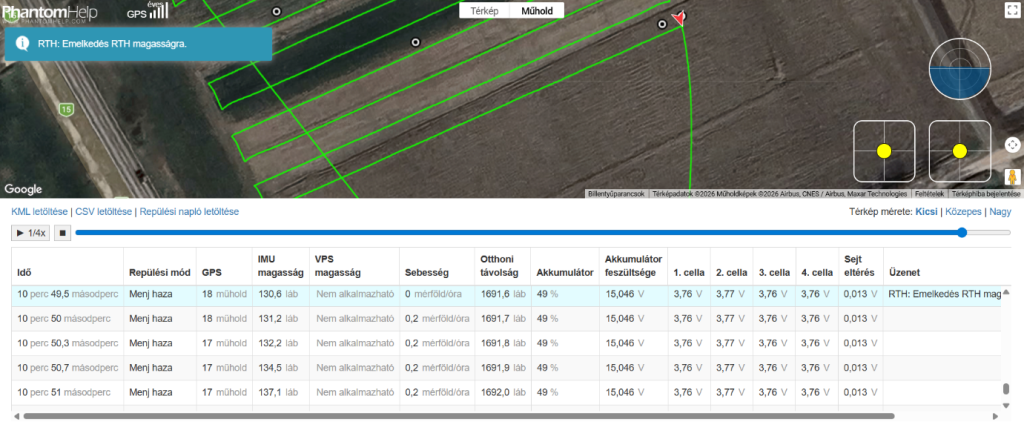
Figure 7 Aircraft climbing to the predefined RTH altitude
Subsequently, the pilot interrupted the automated return process, switched back to manual mode, and continued the return flight under manual control.
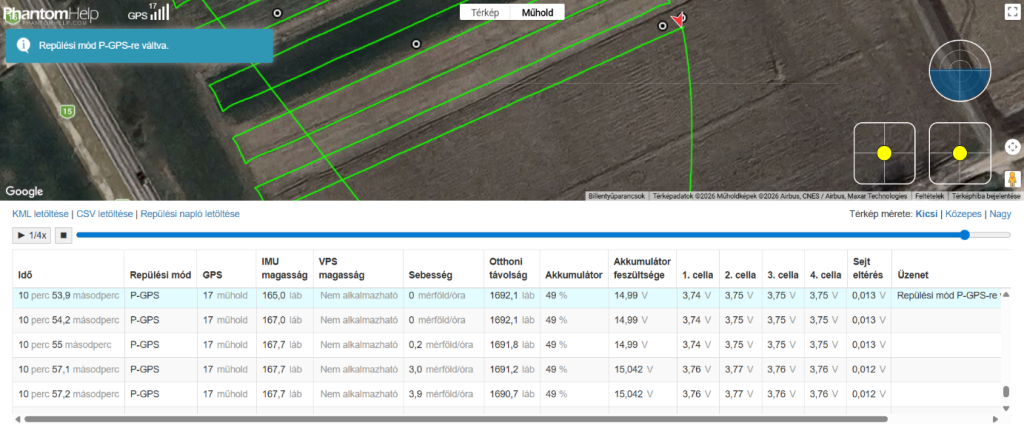
Figure 8 Flight mode transition to P-GPS initiated by the remote pilot
Manual Return and Loss of Link
During the initial phase of the manual return, no error messages or system warnings were observed in the onboard feedback. The return flight progressed without apparent issues.
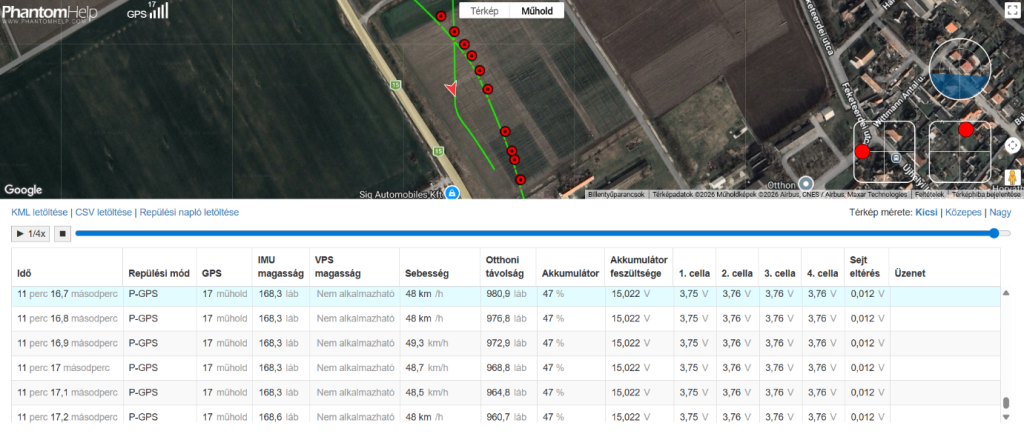
Figure 9 Aircraft under manual control
In a later phase of the manual return, a brief abnormal movement resembling drift was observed in the aircraft’s motion. The remote pilot detected this deviation and actively corrected it, after which the flight remained controllable.

Figure 10 Drift observed shortly before total signal loss
At this stage, a certain degree of uncertainty was already noticeable in the control behavior; however, the onboard system did not issue any error messages or warnings.
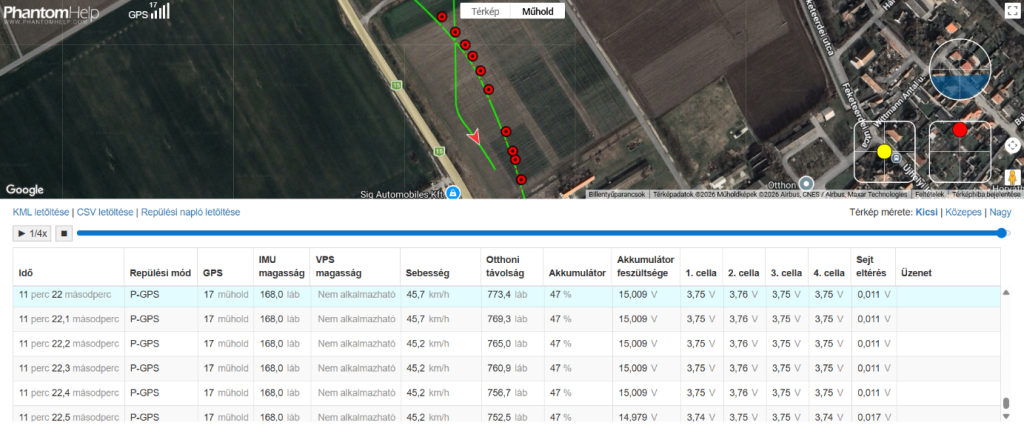
Figure 11 Aircraft proceeding under pilot control without error indication
In the subsequent phase of the flight, communication between the remote controller and the aircraft was unexpectedly lost. Simultaneously, flight log recording also ceased, meaning that no complete objective data are available for the final phase of the flight. Based on the available information, it cannot be excluded that a brief lateral deviation occurred immediately prior to the loss of connection; however, its magnitude and precise role can no longer be clearly reconstructed.
All communication between the aircraft and the remote pilot was lost, resulting in the controller providing no feedback whatsoever, including loss of live camera image.

Figure 12 State of complete signal loss
Outcome and Lessons Learned

Following the loss of communication, the aircraft impacted the ground and suffered multiple critical structural damages. Due to the severity of the damage, the aircraft became unsuitable for further flight operations, as also illustrated by the accompanying image. After the incident, the condition of the aircraft led the manufacturer to recommend replacement of the unit rather than further investigation.
The post-event analysis highlights an important lesson: multiple consecutive onboard warnings and irregular behaviors were already identifiable during the early and middle phases of the flight. Individually, these signals did not justify immediate termination of the monitoring operation; however, taken together, they indicated a system state requiring heightened attention. In hindsight, it may have been a more prudent decision to abort the monitoring operation earlier and initiate a safe return, even if certain segments of the flight appeared stable at the time.
