1. Bevezetés
A 3. részben bemutatott esemény – amely sodródást követően kommunikációs megszakadással és fizikai sérüléssel végződött – nem zárta le a vizsgálatot. Egyetlen törés önmagában lehet műszaki hiba, pilóta általi beavatkozással vagy annak hiányával összefüggő tényező, illetve környezeti hatás következménye. Azonban amikor rövid időn belül, azonos műveleti területen ismét instabilitás jelentkezik, a kérdés már nem egyedi esetről, hanem mintázatról szól.
A jelen rész egy hat nappal későbbi, 2024.06.13-án végrehajtott monitoring műveletet elemez. A repülés ugyanazon mezőgazdasági területen történt, azonos feladattal: előre programozott útvonal mentén, automatizált mezőgazdasági felmérési művelet keretében.
A körülmények első ránézésre nem indokolták volna a rendellenességet. Nyílt mezőgazdasági terület, programozott repülés, autonóm útvonalkövetés. A rendszer működőképes volt, a repülés stabilan indult. Mégis, a művelet során ismét instabilitás jelentkezett – ezúttal több tengely mentén.
A 3. részben bemutatott törés után a kérdés már nem az volt, hogy „mi történt?”, hanem az, hogy „ismétlődik-e a jelenség?”. A 06.13-i repülés ennek a kérdésnek az első válasza.
Ebben a részben a második eseményt vizsgáljuk meg
a repülési napló adatai alapján, szakaszról szakaszra. Nem következtetésekkel kezdünk, hanem a rögzített adatokkal: felszállás, automatizált repülés módváltás, instabilitás, beavatkozás és nem tervezett földet érés.
Mert ha ugyanazon a területen, rövid időn belül kétszer is instabil repülési állapot alakul ki, az már nem pusztán esemény – hanem akár vizsgálati irány.
2. Felszállás és automatizált repülés
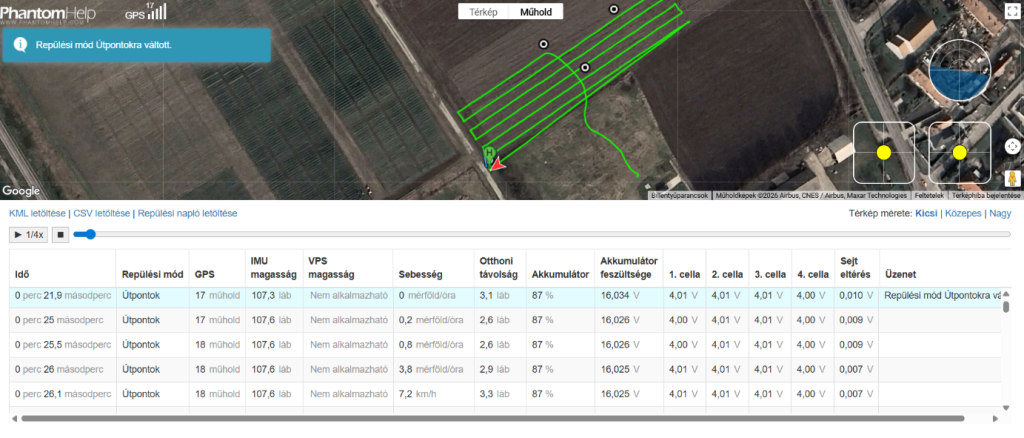
A PhantomHelp napló alapján a repülés kézi felszállással indult. A rotorok indítását követően a rendszer stabil GNSS vételt mutatott (17–18 műhold), hibaüzenet nem jelent meg. A kezdeti másodpercekben a légijármű földközeli állapotban volt, a magassági adatok nem mutattak rendellenességet.

1. ábra: A repülés kezdeti másodpercei
A felszállást követően a légijármű stabil állapotban emelkedett, és csak ezt követően került sor az automatizált waypoint-alapú művelet aktiválására.
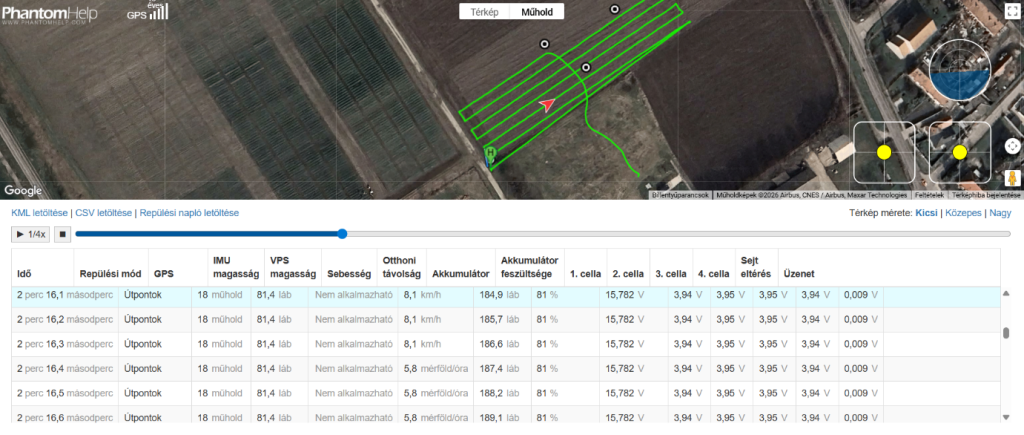
2. ábra: Az automatizált útvonal-végrehajtás aktiválása
A légijármű megkezdte az automatizált waypoint-követést. A logvizualizáció alapján a repülési pálya ebben a szakaszban pontosan illeszkedik a tervezett útvonalhoz. Az iránytartás stabil, az útvonal nem mutat oldalirányú eltérést vagy korrekciós kilengést.
3. ábra: Stabil automatizált repülési szakasz a művelet középső fázisában
A rögzített pályaadatok nem mutatnak korrekciós kilengéseket vagy kényszerű iránytartási beavatkozásokat. A térképes megjelenítésen a repülési vonal egyenletes, a waypoint-szegmensek közötti átmenetek simák, nem azonosítható hirtelen yaw-irányú ( a drón függőleges tengely körüli elfordulását jelenti (az orr balra-jobbra fordul) elfordulás vagy túlkormányzás. A rendszer ebben a szakaszban a GNSS-alapú pozíció-tartó üzemmódban működik, a vízszintes irányú stabilizáció aktív.
Fontos kiemelni, hogy a repülés ezen fázisában sem a fedélzeti visszajelzések, sem a térképes pálya nem utal instabilitásra. Ez a stabil automatizált szakasz különösen jelentős az esemény későbbi értelmezése szempontjából, mivel az ezt követő módváltás nem egy fokozatosan romló pályából, hanem egy látszólag normál működési állapotból történik.
3. Váratlan ATTI mód
Az automatizált repülés huzamosan stabil működést mutatott, azonban a művelet későbbi szakaszában váratlan módváltás következett be. A rendszer ATTI (Attitude) repülési módba váltott, amely olyan üzemmód, ahol a légijármű nem használ GNSS-alapú pozíciótartást, és csak a fedélzeti inerciális érzékelők segítségével stabilizálja a dőlésszöget és a magasságot. A módváltás körülményeinek megértéséhez célszerű áttekinteni az azt közvetlenül megelőző állapotot.
3.1 Az ATTI mód előtti utolsó stabil állapot:
A PhantomHelp vizualizáció alapján az ATTI mód megjelenése előtti pillanatban a rendszer még pozicionált üzemmódban működik. A rotorok indítását követően 6 perc 14,6 másodpercnél a repülési mód továbbra is „Útpontok”, 18 műholdas GNSS vétel. Hibaüzenet nem látható, a repülési pálya illeszkedik a tervezett útvonalhoz. A horizontális stabilizáció aktív, az iránytartás egyenletes.
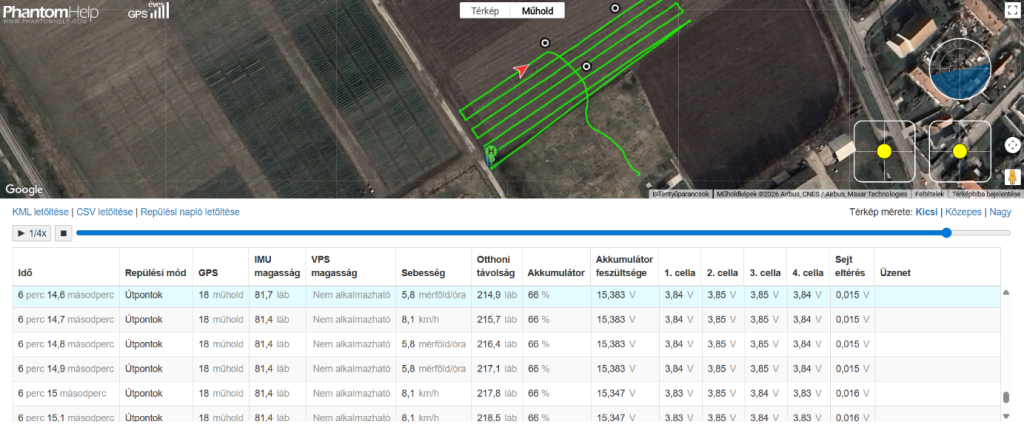
4. ábra: Az ATTI mód előtti utolsó stabil pillanatok
A Pozicionált üzemmód, waypoint-követés aktív, hibaüzenet nem jelenik meg.
A képen látható adatok bizonyítják és alátámasztják, hogy a módváltás nem egy fokozatos stabilitásromlás eredménye volt, hanem az automatizált repülési szakasz során be.
3.2 ATTI módba váltás
Az automatizált repülés közben a rendszer váratlanul ATTI módba váltott. A PhantomHelp időskála szerint a módváltás 6 perc 19,2 másodpercnél következik be. A logvizualizáción egyértelműen látható a repülési mód változása, amely nem a pilóta beavatkozásának eredményeként történt, hanem az automatizált repülési szakasz során következett be. A váltás pillanatában a kontroller nem volt aktívan a pilóta kezében, mivel a művelet előre programozott útvonal mentén zajlott.
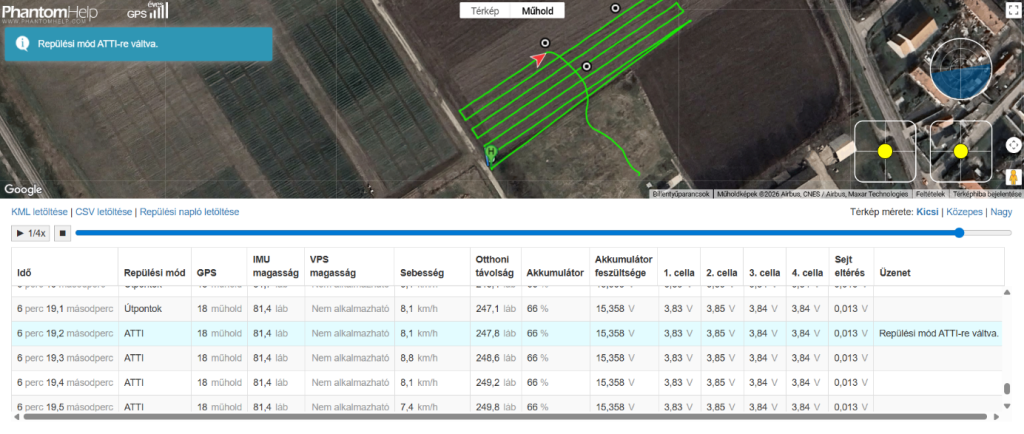
5. ábra: Repülési mód váltása ATTI üzemmódra
A PhantomHelp naplóban megjelenő módváltás az automatizált szakasz közben.
A módváltás a térképes pályán is értelmezhető törést eredményez: az addig szabályos, waypoint-követő repülési vonal eltérést mutat, amely egybeesik az ATTI mód megjelenésével.
ATTI módban a rendszer nem alkalmaz GNSS-alapú horizontális pozíciótartást. A stabilizáció ilyenkor kizárólag az inerciális mérőegység (IMU) és a barometrikus magasságmérés adataira támaszkodik. Ez a gyakorlatban azt jelenti, hogy a légijármű vízszintes irányban nem képes fix pozíciót tartani. A drón nem „áll meg” a levegőben, hanem a külső hatások – elsősorban a szél – hatására elmozdul.
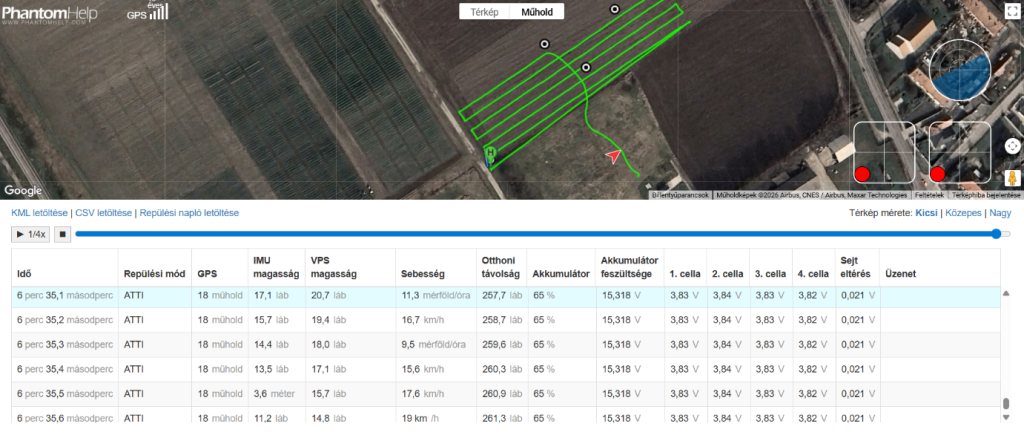
3.3 A sodródás megjelenése
Az ATTI módba váltást követően néhány másodperccel, 6 perc 21,5 másodpercnél a repülési pályán már egyértelmű eltérés figyelhető meg. Az addig egyenes, waypoint-alapú vonalvezetés megtörik, és a légijármű több tengely mentén instabil mozgást mutat.
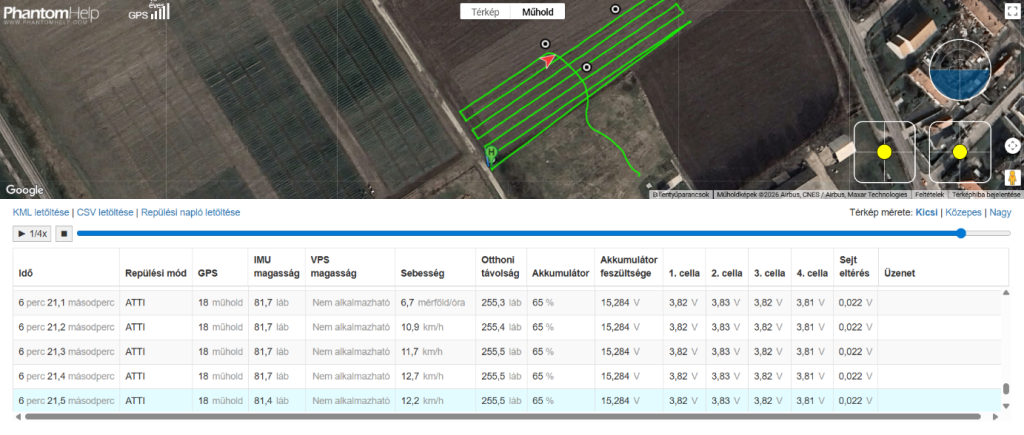
6. ábra: sodródás kezdete
A log alapján ebben a szakaszban a GNSS-alapú pozíciómegtartás megszűnt, miközben a magassági stabilizáció még aktív maradt. A rendszer nem kapcsolt ki, nem történt kommunikációs megszakadás, hanem korlátozott stabilizációs üzemmódba degradált, de működő üzemmódba lépett át.
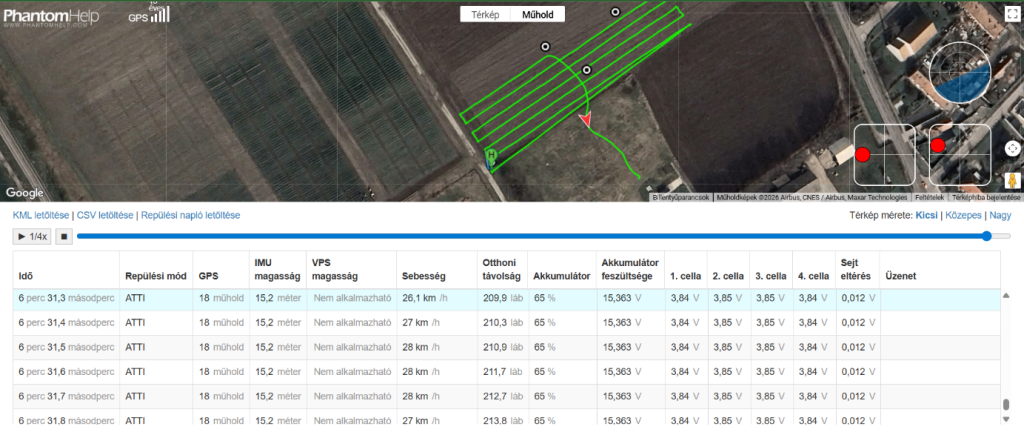
3.4 Pilótai észlelés és beavatkozás
Az ATTI módba váltást követően a sodródás néhány másodpercen belül láthatóvá válik. A PhantomHelp napló alapján 6 perc 21,5 másodpercnél már egyértelmű pályaeltérés figyelhető meg, amely az automatizált útvonaltól való eltávolodást mutatja.
A drift dinamikus szakasza 6 perc 24,1 másodpercnél válik markánssá: a légijármű ATTI módban, 17,7 km/h körüli sebességgel mozog. Ez az állapot már nem passzív lebegés, hanem aktív sodródási fázis.
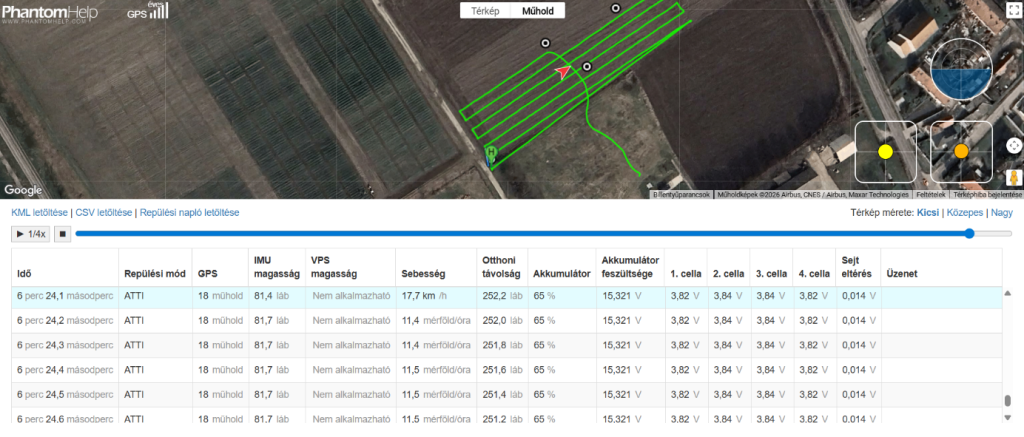
7. ábra: Manuális beavatkozás és stick input megjelenése
A pilóta reakciója az ATTI módot követően.
Ebben a szakaszban azonosítható a manuális beavatkozás megkezdése. ATTI módban a pilóta feladata nem a pozíció megtartása, hanem a sodródás aktív ellensúlyozása. Mivel a módváltás automatizált waypoint-repülés közben következett be, a pilóta nem folyamatos manuális kontroll alatt tartotta a légijárművet, hanem az útvonal-végrehajtásra támaszkodott.
Az esemény időalapú vizsgálata alapján az utolsó stabil waypoint-szakasz (6:14,6) és a dinamikus sodródás kezdete (6:24,1) között kevesebb mint 10 másodperc telt el. Ez rendkívül szűk reakcióidő-ablakot jelent egy automatizált repülési történő manuális átvétel esetén.
. A pilótai kontroll visszaszerzése ebben a helyzetben jelentős kognitív terheléssel járhat, különösen akkor, ha a módváltás nem előre jelzett.
4. Több tengelyen jelentkező sodródás
Az ATTI módba váltást követően a légijármű mozgásában nem csupán oldalirányú eltérés volt megfigyelhető. A térképes logvizualizáció alapján az addig szabályos, waypoint-követő pálya megtörik, és a repülési vonal nem egy irányban, hanem több tengely mentén kezd eltérni.
A log alapján:
- oldalirányú sodródás jelentkezett, amely a tervezett útvonalhoz képest egyértelmű horizontális elmozdulásként azonosítható,
- yaw irányú elfordulás volt tapasztalható, ami a légijármű iránytartásának instabilitását jelzi,
- magassági eltérés is megfigyelhető volt, ami arra utal, hogy a vertikális stabilizáció sem maradt teljesen érintetlen.
A PhantomHelp vizualizáción jól látható, hogy az addig párhuzamos tervezett repülési vonal hirtelen megtörik, és a pálya több irányba torzul. Az eltérés nem egy domináns irány mentén növekszik, hanem irány- és orientációváltozással együtt jelenik meg.
8. ábra: A waypoint-követő pálya megtörése ATTI módban
Az ábrán látható kitérés többtengelyes jellegű: a horizontális elmozdulás mellett az orientációváltozás is azonosítható. Ez a kombináció eltér a klasszikus, egyirányú drift jelenségtől.
A pályagörbe nem egyenletes, lineáris driftet mutat, hanem rövid ideig összehangolatlan, tekergő jellegű mozgást ír le. A repülési útvonal ebben a szakaszban nem egyetlen vektor mentén tolódik el, hanem a horizontális síkban és az iránytengely mentén egyaránt instabilitást mutat.
Ez a többtengelyes eltérés lényegesen különbözik a klasszikus, lassan kialakuló sodródási jelenségtől. A klasszikus drift során a légijármű fokozatosan, egy irányba tér el az ideális pályától, miközben az iránytartás többnyire stabil marad. A jelen esetben azonban az eltérés nem kizárólag pozíciós, hanem irány- és részben magassági komponenssel is rendelkezik.
A sodródás későbbi szakaszában a légijármű irányítása tovább romlik, és tengelyállása már nem illeszkedik a megtett útvonal irányához. A repülési vektor és az orrpozíció között látható szögeltérés alakul ki.
9. ábra: Kifejezett orientációeltérés és instabil tengelyállás ATTI módban
Az ábrán megfigyelhető, hogy a légijármű orientációja (yaw irány) nem követi a tényleges mozgás irányát. Ez a jelenség a többtengelyes instabilitás egyértelmű vizuális bizonyítéka.
A mozgás vizuálisan nem tekinthető kontrollált sodródásnak. A pálya rövid időre olyan jellegű kilengést mutat, amelyben a horizontális elmozdulás és a yaw-eltérés egymással párhuzamosan jelentkezik. Ez a kombinált instabilitás különösen megnehezíti a helyzet gyors értelmezését, mivel a légijármű nem csupán elmozdul a tervezett útvonalról, hanem orientációja is változik.
A többtengelyes instabilitás ebben a szakaszban már dinamikus sodródási állapotként értelmezhető, nem pusztán passzív driftként.
Fontos hangsúlyozni, hogy ebben a szakaszban nem történt kommunikációs megszakadás, a rendszer működött, a log folyamatosan rögzítette az eseményeket
5. Pilóta beavatkozás és kontrollélmény
Az ATTI módba váltás nem csupán technikai esemény, hanem a pilótai kontroll dinamikájának hirtelen megváltozása is. Automatizált waypoint-repülés során a pilóta jellemzően nem folyamatos finomkorrekciót végez, hanem a rendszer pozíciótartására támaszkodik. ATTI módban ez a stabilizáció megszűnik, és a kontroll jellege azonnal átalakul.
Pozicionált üzemmódban a stick középállás relatív nyugalmi állapotot eredményez. ATTI módban azonban a stick középállás nem jelent megállást, csupán nulla vezérlési parancsot. A légijármű tovább sodródik a külső hatások mentén, amennyiben aktív ellenkormányzás nem történik.
Ez a váltás nem fokozatos, hanem azonnali. A pilótának néhány másodpercen belül át kell térnie egy teljesen eltérő kontroll-logikára.
A logadatok alapján a sodródási szakaszban azonosíthatók a markáns stick inputok, amelyek a manuális beavatkozás megkezdését jelzik. A vezérlési parancsok intenzitása arra utal, hogy a pilóta aktív korrekciós kísérletet hajtott végre az instabil mozgás ellensúlyozására.
10. ábra: Markáns stick inputok ATTI módban
Az ábrán megfigyelhető, hogy a vezérlési parancsok amplitúdója meghaladja a normál waypoint-repülés során jellemző finomkorrekciós tartományt. Ez aktív manuális stabilizációs kísérletre utal.
A jelen esetben a logadatok alapján a rendszer működőképes maradt, a kommunikáció fennállt, ugyanakkor a repülési viselkedés instabil maradt. Ez a helyzet különösen kritikus, mivel a kontrollérzet és a tényleges stabilizáció nem esik egybe.
A sodródás dinamikus szakaszában a horizontgörbe és az orientációs adatok is kilengéseket mutatnak, ami arra utal, hogy a légijármű nem csupán pozícióban, hanem attitűd-szinten is instabil állapotban volt.
11. ábra: Horizont- és orientációs kilengések ATTI módban
Az ábrán látható eltérések azt mutatják, hogy a repülési irány és a tengelyállás közötti összhang nem állt helyre azonnal a manuális beavatkozást követően sem.
Repülésbiztonsági szempontból ez a degradált, de működő állapot külön kategóriát képvisel. A rendszer nem omlik össze, mégsem biztosítja az elvárt stabilitást. Az ilyen helyzetek felismerése és kezelése külön felkészültséget igényel.
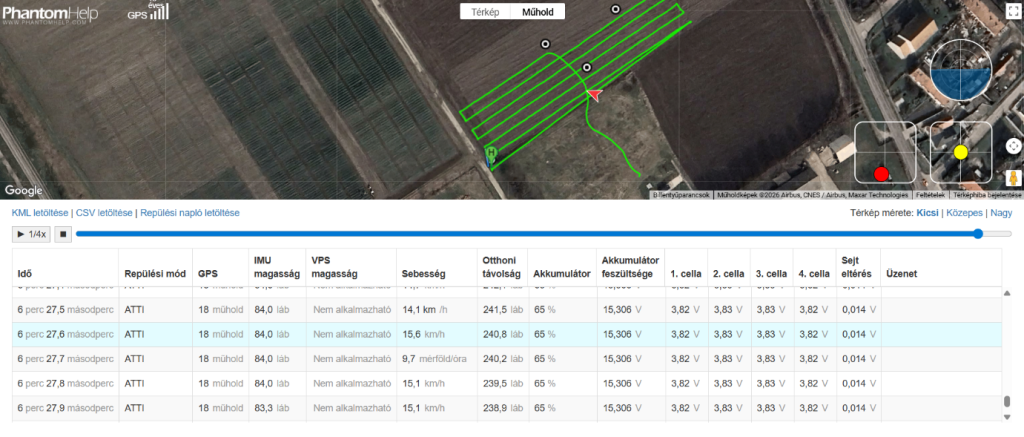
6. Földet érés törés nélkül
A többtengelyes instabilitást és a manuális beavatkozási kísérleteket követően a légijármű végül a tábla melletti, kaszáló jellegű, megközelítőleg 20–25 cm magas aljnövényzettel borított területre sodródott, ahol földet ért.
A PhantomHelp logadatai alapján a talajérintkezés a felszállást követően megközelítőleg 6 perc 38 másodperccel következett be. A rögzített „Home distance” érték alapján az esemény a felszállási ponttól mintegy 290 láb (≈ 88–90 méter) távolságban történt.
PhantomHelp logadatok alapján 6 perc 37–38 másodperc között a magassági érték 0–2 láb tartományba csökken, miközben a vízszintes sebesség még nem nulla. Ez arra utal, hogy a talajérintkezés sodródási állapotból következett be, nem pedig kontrollált leszállási profil mentén.
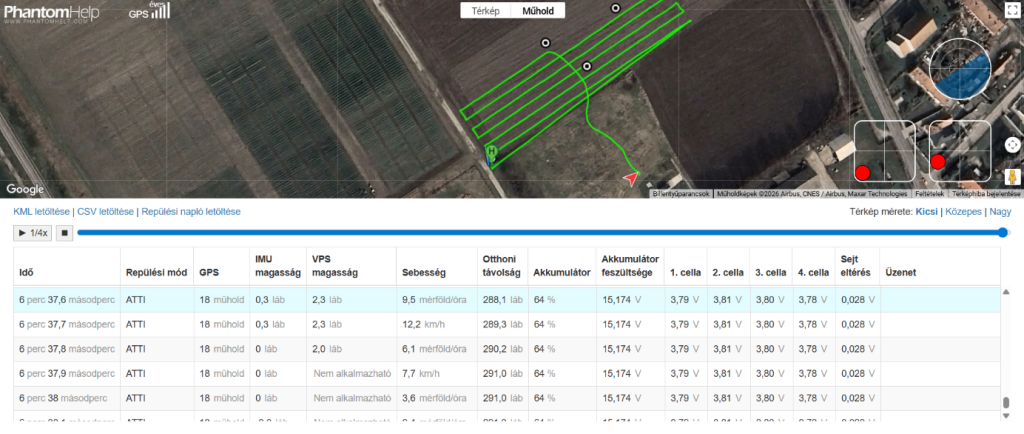
12. ábra: A talajérintkezést megelőző utolsó másodpercek
A földet érés nem kontrollált leszállásként, hanem becsapódásként értelmezhető, ugyanakkor a környezeti feltételek jelentős szerepet játszhattak a kimenet alakulásában. A sűrű, magas aljnövényzet vélhetően részben elnyelte az ütközési energiát, tompítva a légijármű talajjal való érintkezésének dinamikáját.
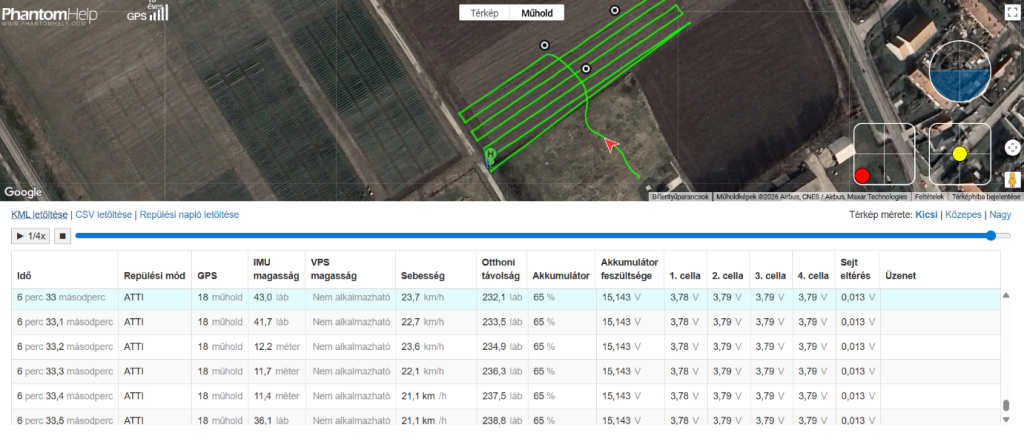
A talajérintkezés pillanatában a horizontjelző rendellenes attitűdöt mutat, amely arra utal, hogy a légijármű nem stabil, vízszintes konfigurációban érte el a felszínt. Ez alátámasztja, hogy a földet érés instabil repülési állapotban következett be.
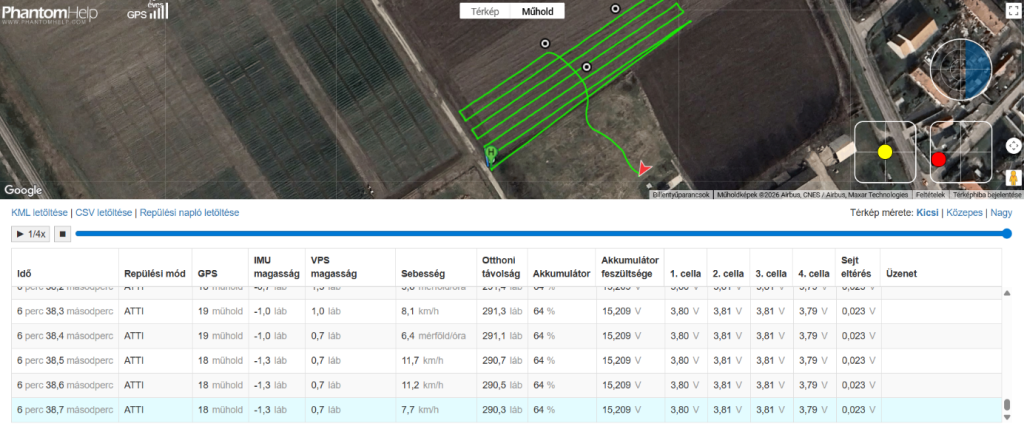
13. ábra: Az utolsó rögzített állapot a földet érés után
A logvizualizáció alapján a vertikális mozgás ebben a szakaszban nem mutat olyan hirtelen, meredek magasságvesztési profilt, amely nagy energiájú zuhanásra utalna. A magasságcsökkenés nem egyetlen, extrém lejtésű szakaszban következett be, hanem egy rövidebb, de nem szélsőséges vertikális eltérésként jelenik meg. Ez a körülmény – a növényzettel együtt – magyarázhatja, hogy a becsapódás ellenére nem következett be szerkezeti károsodás.
A helyszíni vizsgálat során a váz, a kameraegység és a propellerek épek maradtak, látható törés vagy deformáció nem volt azonosítható. A rendszer kommunikációja nem szakadt meg, a log rögzítése folyamatos maradt, így az esemény teljes szakasza rekonstruálható.
Fontos humán faktor szempont, hogy a sodródás iránya a műveleti terület szélén elhelyezkedő épület felé mutatott. A távpilóta számára ez a helyzet potenciálisan kritikus lehetett, mivel az instabil állapot és a korlátozott kontroll mellett fennállhatott az épített környezetbe történő becsapódás kockázata.
Az instabil sodródás és az épület felé történő közeledés kombinációja jelentős pszichés terhelést eredményezhetett. Ilyen helyzetben a kontrollvesztés élménye fokozott stresszt válthat ki, különösen akkor, ha a rendszer működik, de a stabilizáció nem áll helyre azonnal. Paradox módon a talajérintkezés ténye – még ha repülésbiztonsági eseménynek minősül is – az épületbe történő becsapódás elmaradása miatt pszichológiai megkönnyebbülést eredményezhetett.
Repülésbiztonsági szempontból ez külön kategóriát képvisel: a becsapódás ténye önmagában eseménynek minősül, még akkor is, ha látható törés nem történt. Az ilyen kimenet nem tekinthető „szerencsés landolásnak”, hanem olyan helyzetnek, amely a fedélzeti stabilizáció és a pilótai beavatkozás korlátait egyaránt megmutatja.
6.1. A két esemény összevetése
A 2024.06.07-i és a 2024.06.13-i repülések közötti időbeli közelség indokolttá teszi az események strukturált összehasonlítását. Az alábbi táblázat a két művelet legfontosabb jellemzőit foglalja össze:
| Vizsgált szempont | 3. rész – 2024.06.07 | 4. rész – 2024.06.13 |
| Műveleti terület | Azonos mezőgazdasági terület terület | Ugyanaz a mezőgazdasági terület |
| Időbeli eltérés | – | 6 nappal később |
| Művelet típusa | Automatizált mezőgazdasági felmérés | Automatizált mezőgazdasági felmérés |
| Indulási szakasz | Stabil | Stabil |
| Instabilitás kezdete | GNSS-alapú sodródás | ATTI módba váltás |
| Repülési mód az esemény alatt | Pozicionált → kapcsolatvesztés | ATTI fallback |
| Többtengelyes instabilitás | Részben | Kifejezetten megfigyelhető |
| Pilótai beavatkozás | Korlátozott lehetőség | Aktív manuális átvétel |
| Kommunikációs megszakadás | Igen | Nem |
| Földet érés | Crash, szerkezeti sérüléssel | Becsapódás, sérülés nélkül |
| Logadat | Részlegesen megszakadt | Teljes egészében rögzült |
A táblázat alapján megállapítható, hogy bár a két esemény kimenetele eltérő volt, a jelenség alapvető jellemzői több ponton átfedést mutatnak. Az azonos műveleti terület, a hasonló automatizált repülési profil és a GNSS-alapú stabilizáció megszűnése mindkét esetben jelen volt.
A két esemény közös eleme tehát nem pusztán a sodródás ténye, hanem a pozicionált stabilizáció megszűnéséhez kapcsolódó instabil repülési állapot kialakulása.
A különbség elsősorban a rendszerreakcióban és a lefolyásban mutatkozik meg: az első eset kapcsolatvesztéssel és strukturális sérüléssel zárult, míg a második esetben ATTI fallback mellett a rendszer működőképes maradt, a log teljes egészében rögzült, és a földet érés szerkezeti károsodás nélkül következett be.
7. Tanulság
A két, időben közeli repülés során azonos műveleti területen, hasonló automatizált felmérési repülési mellett jelentkezett instabil repülési állapot. Bár a két esemény kimenetele eltérő volt – az első eset strukturális sérüléssel, a második szerkezeti károsodás nélkül zárult –, a jelenség alapmintázata több ponton egyezést mutat.
Mindkét esetben a GNSS-alapú horizontális stabilizáció megszűnése állt az instabilitás középpontjában. A rendszer egyik alkalommal kapcsolatvesztéssel, másik alkalommal ATTI fallback móddal reagált, azonban a pozicionált üzemmód megszűnése mindkét esetben többtengelyes sodródáshoz vezetett.
A második repülés részletes logadatai alapján különösen fontos megállapítás, hogy:
- a stabil automatizált szakaszból az instabil állapotba történő átmenet néhány másodperc alatt zajlott le,
- a rendszer működőképes maradt,
- a pilótai beavatkozás azonosítható volt,
- ugyanakkor a stabilizáció nem állt helyre azonnal.
Ez rámutat arra, hogy a degradált, de működő repülési állapot külön repülésbiztonsági kategóriát képvisel. Az ilyen helyzetek nem járnak feltétlenül kommunikációs megszakadással vagy rendszerleállással, mégis jelentős kontrollvesztési élményt és operatív kockázatot hordoznak.
A két esemény közelsége és az azonos földrajzi környezet felveti a környezeti tényezők szerepének lehetőségét. A vizsgált időszakban a GNSS-jelminőség és a geomágneses aktivitás eltérő paramétereket mutatott, ugyanakkor a rendelkezésre álló adatok alapján közvetlen oksági kapcsolat nem állapítható meg egyértelműen.
A vizsgálat során felmerült a naptevékenység és az űridőjárási hatások potenciális szerepe is, mint lehetséges befolyásoló tényező. Bár ez a feltételezés további, célzott mérések és GNSS-minőségi adatok nélkül nem bizonyítható, a hasonló automatizált műveletek tervezésekor indokolt lehet az űridőjárási környezet figyelembevétele.
A jelen elemzés egyik legfontosabb tanulsága, hogy:
- az automatizált waypoint-repülés nem mentes a hirtelen stabilitásvesztés kockázatától,
- az ATTI fallback mód nem tekinthető „biztonságos lebegési” állapotnak,
- a pilótai felkészültségnek ki kell terjednie a GNSS-pozicionálás váratlan megszűnésének kezelésére is.
A második esemény szerkezeti sérülés nélkül zárult, azonban repbiztonsági szempontból nem tekinthető jelentéktelen incidensnek. A kontrollvesztés rövid ideig fennálló állapota és a többtengelyes instabilitás egyaránt rámutat a fedélzeti stabilizáció és a humán reakcióidő korlátaira.
A két eset együttes vizsgálata így nem csupán egyedi repülési rendellenességként értelmezhető, hanem olyan jelenségként, amely automatizált mezőgazdasági műveletek során külön figyelmet érdemel.